高度な自動化のための高精度産業用ロボット旋回リング軸受
はじめに:ロボット動作の中核
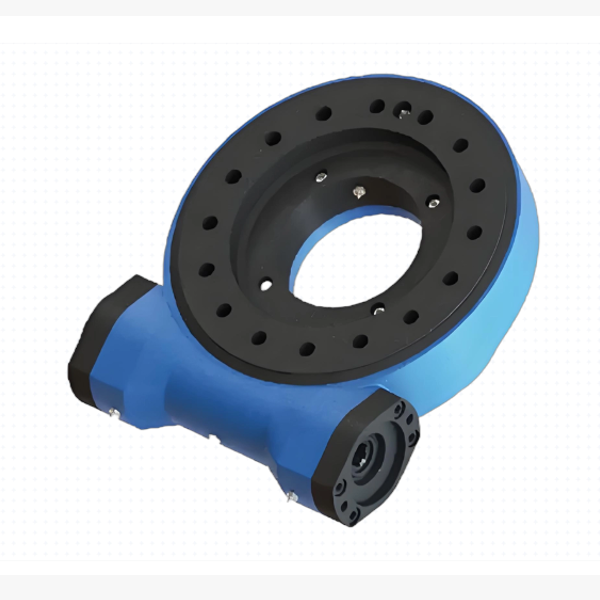
精密伝動産業に特化した専門メーカーとして、あらゆる産業用ロボットの心臓部は関節にあることを理解しています。当社の産業用ロボット旋回リング軸受(ターンテーブル軸受またはロータリーテーブル軸受とも呼ばれる)は、現代の自動化に要求される卓越した回転精度と剛性を提供するよう設計されています。
標準軸受とは異なり、当社の旋回リングは複雑な複合荷重を支えるように設計されています。軸方向力、半径方向力、および傾斜モーメントを最小限の変形で同時に処理します。6軸多関節ロボットから高速SCARAロボットまで、当社の軸受は滑らかで正確かつ再現性のある動きを保証し、機械の寿命と精度に直接貢献します。
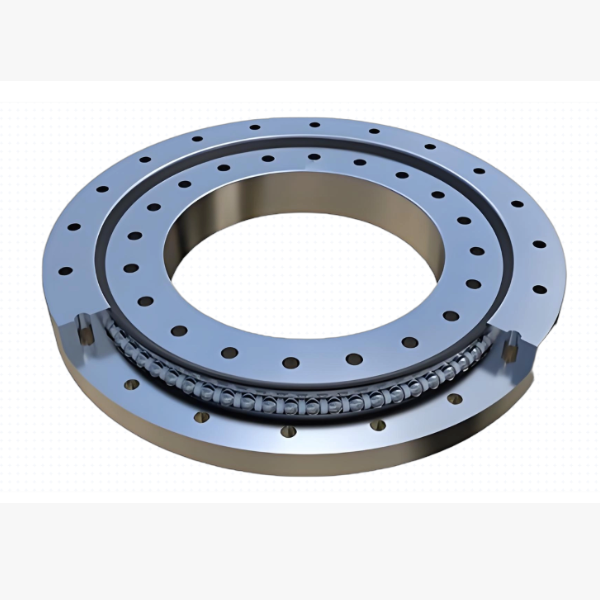
最大限の耐久性と回転精度を追求して設計されたZZ製直径1500mm旋回軸受は、過酷な産業機械向けの高性能ソリューションです。旋回軸受の大手メーカーとして、ZZは優れた荷重容量、長寿命、多様な用途へのシームレスな統合を実現するカスタム設計の回転支持システムを提供します。この3列ローラタイプの旋回リングは、建設、再生可能エネルギー、海洋、マテリアルハンドリング機器など、極限荷重下での信頼性が不可欠な重負荷用途向けに最適化されています。
当社は、インダストリー4.0の厳しい要求を満たす軸受を製造するために、高度な製造技術を活用しています。当社の産業用ロボット旋回リングは、耐久性と精度の代名詞です。
-
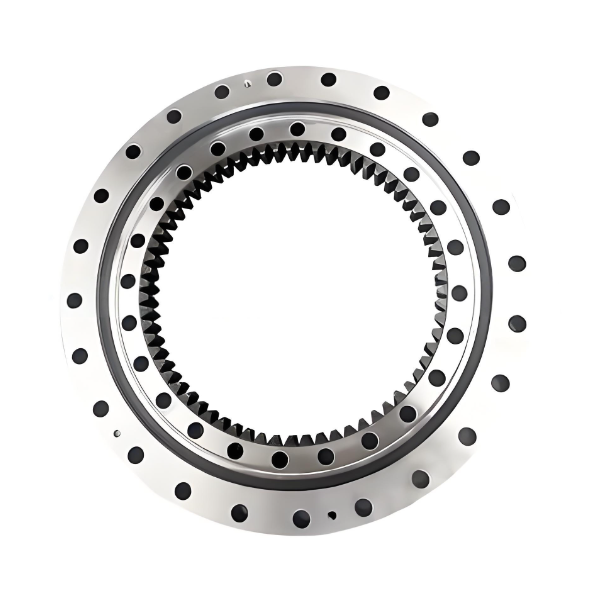
優れた剛性と負荷容量:クロスローラーまたは多列ボール軌道設計を採用し、当社の軸受は従来のアンギュラ玉軸受の3~4倍の剛性を提供します。これにより、高速加減速時でも安定性が確保されます。
-
超高精度:振れと寸法精度に関して厳格な公差を維持しています。この精度により振動が最小限に抑えられ、ロボットアームが目標座標にサブミリ精度で到達することが保証されます。
-
コンパクトで軽量な設計:断面を最適化(薄肉設計)することで、負荷容量を犠牲にすることなくロボット関節の重量とスペース要件を低減し、よりコンパクトなロボット設計を可能にします。
-
低摩擦と滑らかな回転:高度な熱処理とナノレベルの表面仕上げにより摩擦係数が低減され、エネルギー効率の高い動作と発熱の低減が実現します。
-
統合シール:高性能ラビリンスシールとラバーコンタクトシールが内部軌道を粉塵、切りくず、クーラントの侵入から保護し、過酷な産業環境での信頼性の高い動作を保証します。
当社のシールシステムは、オイル、塵、湿気に耐性のあるデュアルリップNBRゴムシールを採用し、汚染リスクとメンテナンス頻度を大幅に低減します。潤滑は戦略的に配置されたグリース注入口により最適化され、すべての転動体に均等に分配されます。
当社の製品ラインは、小型組立ロボットから重量物パレタイジングユニットまで、さまざまなロボットペイロードに適した幅広い寸法をカバーしています。
|
技術仕様
|
仕様範囲
|
|
ベアリングタイプ
|
クロスローラー / 4点接触玉 / 複列玉
|
|
内径
|
20 mm~2000 mm(カスタマイズ可能)
|
|
材質
|
高炭素クロム鋼(52100 / SUJ2) / ステンレス鋼(440C)
|
|
硬さ
|
P4、P2、SP、UP(ABECクラス7 / クラス9)
|
|
精度等級
|
C0、C2、C3(予圧対応により隙間ゼロ)
|
|
ISO P0(P6対応可)
|
ラバーコンタクトシール(LLU/2RS)、メタルシールド(ZZ)、オープン
|
|
内歯ギア、外歯ギア、またはギアレス
|
高性能グリース(リチウム/フッ素系)
|
|
円筒ころ(GCr15 / GCr15SiMn)
|
黄銅、ナイロン(PA66)、または鋼
|
遊戯施設での用途
品質は単なる約束ではなく、認定された基準です。当社の製造プロセスは国際品質マネジメントシステムに準拠し、一貫性と信頼性を確保しています。
-
ISO 9001:認定品質マネジメントシステム
-
ISO 14001:環境マネジメントへの適合。
-
JIS B 1514:転がり軸受に関する日本工業規格への適合。
-
DIN 628:軸受寸法と公差に関するドイツ工業規格への準拠。
-
RoHS準拠:使用材料は環境に優しく、規制物質に準拠しています。
また、3D CADモデル(STEP、IGES、Parasolid)、取扱説明書、トルク仕様を含むデジタル製品ドキュメントも提供しています。
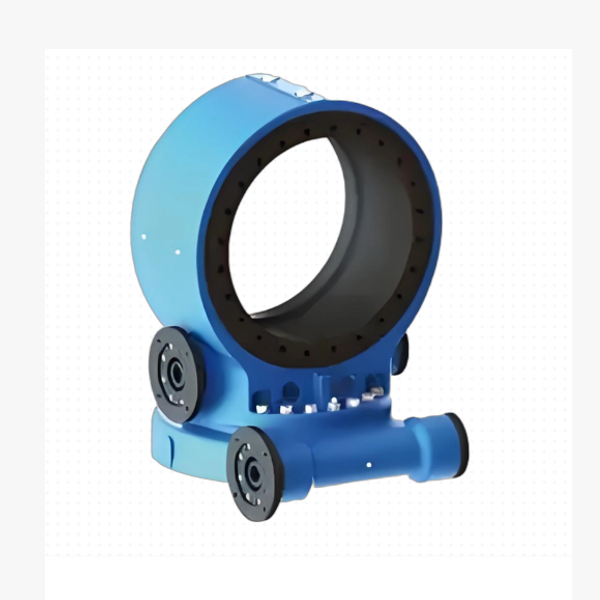
当社の旋回リング軸受は機械の「関節」であり、高い動的応答性と精度が要求される用途に不可欠です。
-
産業用ロボット:多関節ロボット(6軸)、SCARAロボット、デルタロボット。
-
協働ロボット(コボット):人間と共に作業するように設計された軽量ロボットアーム。
-
工作機械:CNCロータリーテーブル、割り出しヘッド、高速スピンドル。
-
半導体製造:ウェハ搬送ロボット、クリーンルーム自動化。
-
医療機器:CTスキャナー、手術ロボット、放射線治療位置決めシステム。
-
航空宇宙・防衛:レーダーアンテナマウント、衛星位置決め機構。
当社のサービス
当社は既製部品以上のものを提供します。エンジニアリングソリューションを提供します。
-
OEM・ODMサポート:寸法、材料、取付穴を特定のロボット設計に合わせてカスタマイズできます。
-
ラピッドプロトタイピング:柔軟な製造ラインにより、迅速なサンプル納品(通常7~15日)が可能で、研究開発段階を加速します。
-
技術コンサルテーション:当社のエンジニアリングチームが軸受選定、寿命計算(L10)、潤滑戦略の最適化を支援します。
-
グローバル物流:信頼性の高い輸送と梱包により、軸受が世界中どこでも完璧な状態で届きます。
よくある質問(FAQ)
Q1:旋回リングと標準玉軸受の違いは何ですか?
A1:旋回リングは複合荷重(アキシアル、ラジアル、傾斜モーメント)を同時に支えるように設計されていますが、標準軸受は通常ラジアル荷重またはアキシアル荷重のみを扱います。旋回リングは一般的に直径が大きく、機械構造に直接ボルトで取り付けるための取付穴があります。
Q2:特殊なコーティングや材料の軸受を製造できますか?
A2:はい。耐食性のためのステンレス鋼オプションや、過酷な環境向けの特殊コーティング(亜鉛ニッケルや黒染めなど)を施すことができます。また、超高速用途向けのセラミックハイブリッド軸受も製造しています。
Q3:産業用ロボット軸受の標準的なリードタイムはどのくらいですか?
A3:標準モデル(RB、RA、RUシリーズなど)は在庫があるか、1~2週間以内に出荷可能です。カスタム注文は数量に応じて通常3~5週間かかります。
Q4:予圧仕様は提供していますか?
A4:もちろんです。ロボット関節の剛性要件に基づいて、特定のラジアルすきままたは予圧(軽、中、重)を適用し、がたつきを排除できます。
Q5:これらの軸受にはどのように潤滑すればよいですか?
A5:当社の軸受は、一般的な用途に適した高級グリースがあらかじめ封入されています。高速または極端な温度の用途では、動作速度(RPM)と環境に基づいた再潤滑間隔を推奨します。