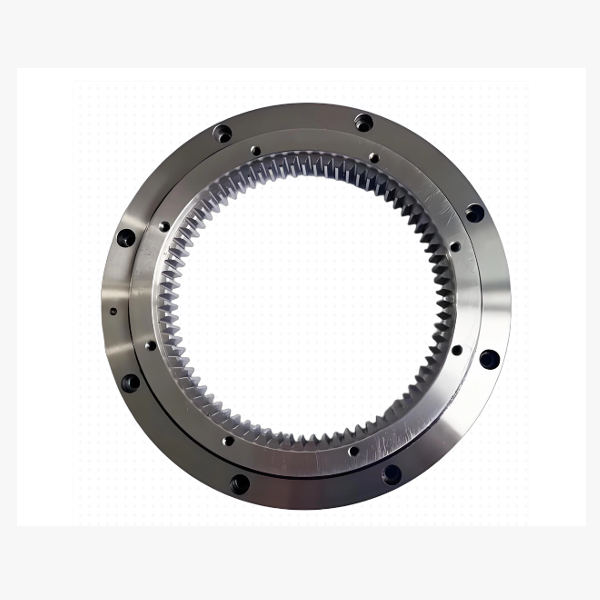
クロスローラ軸受を設計するには、標準の旋回リングとは異なる考え方が必要です。当社の技術的アプローチがどのように優れた性能を実現するかを以下に説明します。
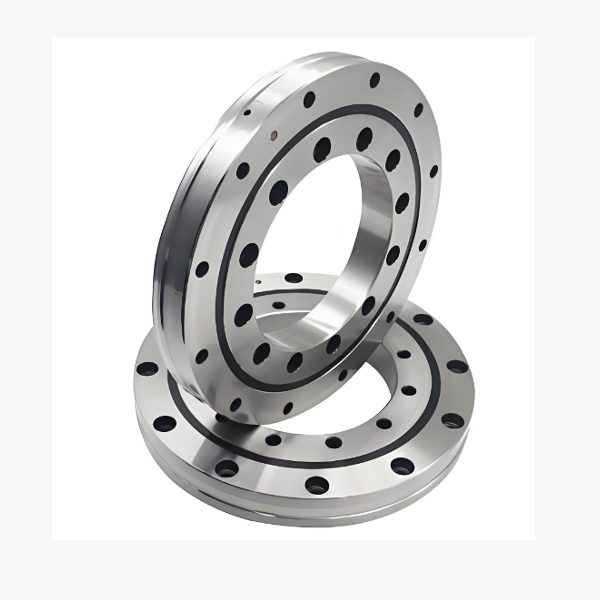
核心的な利点は、円筒ローラーの交差配置にあります。各ローラーは点ではなく線で軌道面と接触します。これにより、同じサイズのボールベアリングと比較して、単位体積あたりの負荷容量が最大30%向上します。さらに重要なのは、負荷時の変形が大幅に低減され、ロボットアームやアンテナが設定された位置に正確に保持されることです。
バックラッシュは精度の敵です。当社の組立工程では、ローラーに精密な予圧を加え、内部のあらゆる隙間を排除します。これにより、高い固有振動数を持つ剛性の高いシステムが構築され、共振を防ぎ、秒単位の繰り返し位置決め精度を実現します。これは高精度のロータリテーブルやCNC工作機械にとって極めて重要です。
隣接するローラーが傾いたり擦れ合ったりして熱や摩耗が発生するのを防ぐため、当社は分割式のナイロンまたはフェノール樹脂製スペーサケージを採用しています。このケージは各ローラーを90°方向に個別に保持し、高速回転でもスムーズな転がり運動を実現します。この設計により摩擦トルクの変動が最小限に抑えられ、一貫した制御フィードバックが得られます。
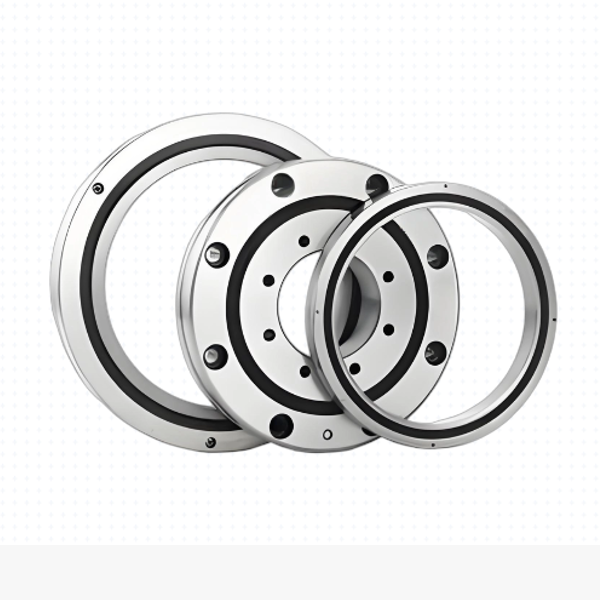
当社のクロスローラ旋回リングの多くは薄肉構造を採用しており、かさばるハウジングなしで軽量構造物に直接取り付けることができます。内輪と外輪には多くの場合、リング本体に直接取り付け穴が設計されており、機械設計全体が簡素化され、重量が軽減されます。これは航空宇宙や移動ロボットにおいて重要な要素です。
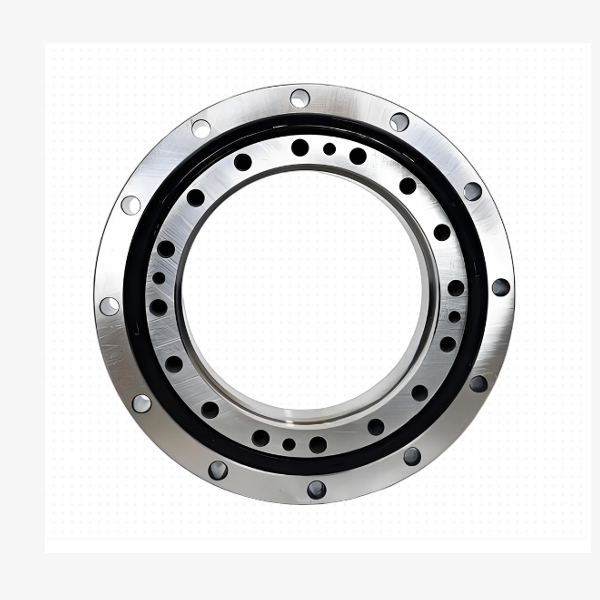
これらの軸受は精密さで知られていますが、半導体製造や医療画像処理などの繊細な環境でも動作します。当社は、ゴムリップを備えた低摩擦のラビリンスシールを提供しており、微細な操作に必要な低トルクを維持しながら、ほこりや切りくずを効果的に排除します。
| 技術仕様 | 仕様範囲 | 注意事項 |
|---|---|---|
| 製品シリーズ | CRシリーズ(クロスローラ) | 高剛性、コンパクト設計。 |
| 外径 (OD) | 80 mm – 1,200 mm | ご要望に応じてより大きなサイズも対応可能。 |
| 内径 (ID) | 60 mm – 1,100 mm | 薄肉オプションにより内径/外径の差を低減。 |
| 全高 | 12 mm – 150 mm | 非常にコンパクトな断面。 |
| ローラ構成 | 90°で交差した円筒ローラ | 最大剛性のための線接触。 |
| 静的アキシャル荷重 | 最大 800 kN | サイズに対して高容量。 |
| 静的ラジアル荷重 | 最大 450 kN | 優れた横方向安定性。 |
| 静的傾斜モーメント | 最大 600 kNm | たわみに対する優れた耐性。 |
| 動的定格荷重 | ISO 76 / DIN 798 に基づき計算 | 精密なサイクリング用に最適化。 |
| リング材質 | 42CrMo4、SUJ2(軸受鋼) | 真空脱ガス処理により純度を向上。 |
| ローラ材質 | GCr15SiMn / 100Cr6 | 精密研削された円筒ローラ。 |
| 硬度 | 58 – 62 HRC | 均一な硬度で耐摩耗性を実現。 |
| HRC 55–62 | P0、P6、P5、P4(ISO) | 高精度グレード対応可能。 |
| 内部すきま | ゼロすきま(プリロード) | 特定アプリケーション向けの軽度プリロードオプション。 |
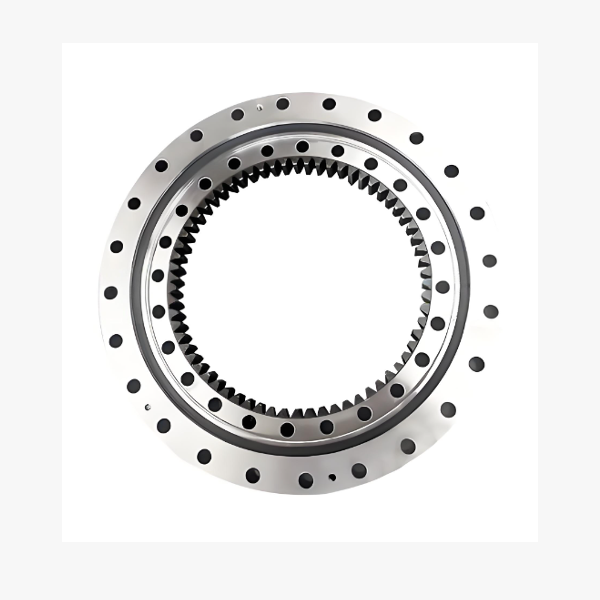
| ギヤオプション | 外歯/内歯平歯車 | モジュールm=1~m=10。 |
| 歯車精度 | DINクラス7/クラス6 | サーボ駆動向け高精度。 |
| ISO P0(P6対応可) | 低摩擦ラビリンス+ゴムリップ | IP54/IP65オプション。 |
| 使用温度 | -30°C~+80°C(標準) | 極限環境向け特殊シール/潤滑剤。 |
| 表面仕上げ | 亜鉛めっき、黒染め、不動態処理 | 耐食処理対応可能。 |
| 取り付け | リング本体のざぐり穴 | 取り付けを簡略化。 |
| 認証 | ISO 9001、CE、RoHS | 完全なトレーサビリティを提供。 |
当社のクロスローラ旋回軸受は、高性能機械の縁の下の力持ちです。
6軸多関節アームからSCARAロボット、協働ロボット(コボット)まで、当社の軸受は繰り返しの溶接、組立、ピックアンドプレース作業に必要な関節剛性を提供します。ゼロバックラッシュ設計により、ロボットはプログラム通り正確に停止します。
CNC機械のロータリテーブル、フライスヘッド、割出し機構は、切削力下での精度維持能力をクロスローラ軸受に依存しています。高剛性がびびりを防ぎ、加工部品の優れた表面仕上げを実現します。
CTスキャナー、MRIガントリー、手術用ロボットアームには、絶対的な位置精度とスムーズでジャークのない回転が必要です。当社の低摩擦・高精度軸受は、医療業界の厳格な安全性と性能基準を満たしています。
衛星通信アンテナ、レーダー皿、ミサイル発射装置には、衝撃荷重に耐えながら正確な照準精度を維持する軸受が求められます。当社のクロスローラ旋回リングはコンパクトで軽量なため、移動式防衛プラットフォームや航空機搭載システムに最適です。
ウェハ搬送ロボットやリソグラフィ装置は、発塵を最小限に抑える必要があるクリーンルームで動作します。当社の密閉型低発塵軸受は、無菌状態を維持しながら、チップ製造に必要なナノメートルレベルの位置決めを実現します。
大型風力タービンは巨大なローラ軸受を使用しますが、集光型太陽光発電(CPV)システム向け精密2軸太陽光トラッカーは、クロスローラ軸受を利用して終日正確な太陽照準を維持し、エネルギー効率を最大化します。

機械の精度を高めてみませんか? 今すぐ当社チームにご連絡いただき、クロスローラ旋回ベアリングに関するご相談を承ります。次のブレークスルーに最適な回転を設計しましょう。
タグ: 風力発電用ヨーリング | 観覧車回転リング | 遊戯施設用大径ベアリング | 大観覧車ターンテーブル | 水処理スクレーパー軸受 | 清澄機ターンテーブル軸受 | 濃縮機用旋回軸受