精密ロボット用旋回軸受:インテリジェント動作の中核
はじめに:ロボットの回転精度を再定義する
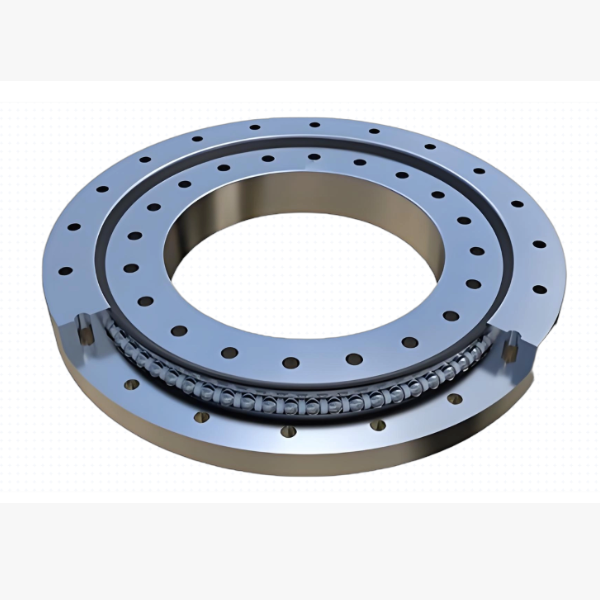
先進ロボット工学の分野では、高機能機と高性能システムの違いは「関節」の精度にあります。当社のロボット用旋回軸受は、現代の自動化における構造的かつ回転的な基盤として機能するよう設計されています。標準的な産業用軸受とは異なり、これらのユニットは複雑な多方向荷重(アキシアル、ラジアル、および傾斜モーメント力をコンパクトな設置面積内で同時に支持)を処理するように設計されています。
協働ロボット(コボット)から重量パレタイジングアームまで、現代のロボット用途では単なる回転以上のもの、すなわち剛性、バックラッシュゼロの位置決め、長期信頼性が求められることを理解しています。高度なギア技術と最適化された内部形状を統合することで、当社の旋回ソリューションは、インダストリー4.0時代に不可欠な、繰り返し精度と動的応答性をロボットに実現します。
製品性能と品質エンジニアリング
当社の製造理念は「過酷環境への耐性」に重点を置いています。ロボット軸受が高繰り返し荷重と変動速度下で動作することが多いことを認識しています。
-
高剛性&高負荷容量:高度な軌道面焼入れプロセスにより、当社の軸受は優れた変形耐性を提供します。内部転動体はモーメントアームを最大化するように配置され、重荷重下でのたわみを最小限に抑える卓越した剛性を実現します。
-
低摩擦&スムーズな起動:精密加工により内部クリアランスを最小限に抑え、低始動トルクを実現します。これは、組立作業や外科手術中に繊細で滑らかな動きを必要とするロボットアームにとって重要です。
-
長寿命化:特殊な熱処理と表面研削技術を採用し、摩耗を大幅に低減。当社の軸受は元の精度クラスを維持しながら何百万回もの回転に耐えるよう試験されています。
-
統合シール:工場環境で一般的な粉塵、油、湿気などの汚染物質から保護するために、当社のユニットは多段ラビリンスシールまたは高品質ゴムコンタクトシール(IP67等級オプションあり)を備えています。
当社のシールシステムは、オイル、塵、湿気に耐性のあるデュアルリップNBRゴムシールを採用し、汚染リスクとメンテナンス頻度を大幅に低減します。潤滑は戦略的に配置されたグリース注入口により最適化され、すべての転動体に均等に分配されます。
当社は標準構成とカスタム構成の幅広い範囲を提供しています。以下は、軽~中負荷用ロボット旋回シリーズの代表的な仕様表です。
|
技術仕様
|
仕様詳細
|
|
ベアリングタイプ
|
交差ローラ旋回/4点接触玉
|
|
性能と品質エンジニアリング
|
50 mm – 600 mm(カスタムサイズ対応可能)
|
|
材質
|
高炭素クロム鋼(GCr15 / 100Cr6 / SAE 52100)
|
|
硬度
|
軌道面:58-62 HRC、芯部:35-40 HRC
|
|
材料トレーサビリティ:すべての鋼材に対し、EN 10204 3.1材料証明書を提供。
|
P5 / P4 / SP(超高精度)
|
|
調整可能予圧
|
ゼロクリアランスまたはプリロード(C0 / C2)
|
|
ギヤオプション
|
外歯、内歯、またはギアなし
|
|
内歯ギア、外歯ギア、またはギアレス
|
高性能グリース(リチウムコンプレックスまたは合成)
|
|
円筒ころ(GCr15 / GCr15SiMn)
|
黄銅、鋼、またはエンジニアリングプラスチック(PA66)
|
Certifications & Standards
品質は単なる約束ではなく、文書化された基準です。当社の生産施設と製品は、厳格な国際プロトコルに準拠しています:
-
ISO 9001:2015:一貫した製造プロセスを保証する認定品質管理システム。
-
DIN / ISO規格:旋回軸受に関するDIN 69121およびISO 4996に厳密に準拠して製造。
-
RoHS & REACH準拠:すべての材料と潤滑剤は、EUおよび北米への輸出に関する環境安全指令を満たしています。
-
トレーサビリティ:原材料鋼の投入から完成品まで、完全な材料ヒートナンバートレーサビリティ。
製品サービスとカスタマイズ
直接メーカーとして、当社は既成品の提供だけでなく、ロボットインテグレーターへの技術パートナーとしての役割も果たします。
-
OEM/ODMソリューション:ボア径、取付穴パターン、ギアモジュールを特定のロボットシャーシに合わせて変更可能。
-
迅速な試作:デジタルツイン製造機能により、7~10日以内に検証用サンプルを生産可能。
-
技術相談:当社のエンジニアリングチームは、荷重定格(L10寿命)の計算や、特定のモーメント荷重(Mx, My, Mz)に最適な軸受タイプの選定を支援します。
用途
当社のロボット用旋回軸受は、さまざまな分野で動作を陰で支える存在です:
-
産業用ロボット:多関節ロボットアーム(腰関節と手首関節)、スカラロボット、ガントリーローダー。
-
協働ロボット(コボット):軽量設計と安全性が最優先される用途。
-
医療用ロボット:手術アームや患者位置決めシステムで絶対精度が要求される用途。
-
AGV・AMR:自立移動ロボットで、ナビゲーションタレット用のコンパクトな回転駆動が必要な用途。
-
外骨格:軽量化と滑らかな関節動作が重要なウェアラブルロボットスーツ。
そのモジュラー設計により、旋回ドライブ、油圧モーター、または電気ドライブとの統合が可能で、新造とレトロフィットの両方に適応できます。
Q:ロボット用途における交差ローラ軸受と4点接触玉軸受の違いは何ですか?
A:交差ローラ軸受は、一般的にローラの線接触により高い剛性と精度を提供し、高負荷・高精度のロボット関節に適しています。4点接触玉軸受はより軽量で高速に対応できますが、剛性はやや低くなる可能性があります。
Q:モーターやエンコーダーを内蔵した軸受を供給できますか?
A:はい、「軸受-モーター統合」を専門としています。軸受ハウジングを加工してダイレクトドライブモーターを受け入れたり、エンコーダーリングを軸受軌道面に直接取り付けてコンパクトなアクチュエータモジュールを形成することが可能です。
Q:ギア歯の精度はどのように保証していますか?
A:CNCギアホブ盤と研削盤を使用しています。ギア歯の精度は通常DINクラス5または6に達し、ピニオンとのスムーズな噛み合いを確保し、ロボット動作中の騒音と振動を最小限に抑えます。
Q:大口注文の標準リードタイムはどのくらいですか?
A:標準モデルの場合、リードタイムは通常15~20日です。カスタムロボット用軸受の場合、期間は複雑さに依存しますが、通常30~45日の範囲です。